麦芽无候
You can program Mecademic robots using three different methods: using Mecademic script files that run on the Mecademic controller, using PY files that are run externally or using the RoboDK driver.
1。Script files:您可以使用Robodk生成可以在Mecademic Controller上加载的脚本。这是使用用于Mecademic机器人的默认后处理器来完成的。您可以使用Mecademic的Web界面直接复制脚本程序。
2。PY文件:您可以使用MecademicT TCP接口生成自动连接到Mecademic Robot的Python文件,并远程运行该程序。您应该选择名为Mexademic Python的后处理器。
3.在线编程: RoboDK can upload your program as an offline program (up to 500) to the robot memory. These offline programs can be called from any other methods.
RoboDK可以生成离线程序,可控硅ipts files and PY files that can be executed by a Mecademic robot. Additionally, it is possible to execute programs on the robot from RoboDK if the robot is connected to the computer.
You need the IP of your Mecademic robot to run or transfer programs from RoboDK. Mecademic robots use the IP 192.168.0.100 by default. You can make sure if the IP of your robot is correct by entering the IP in a browser to access the web interface.
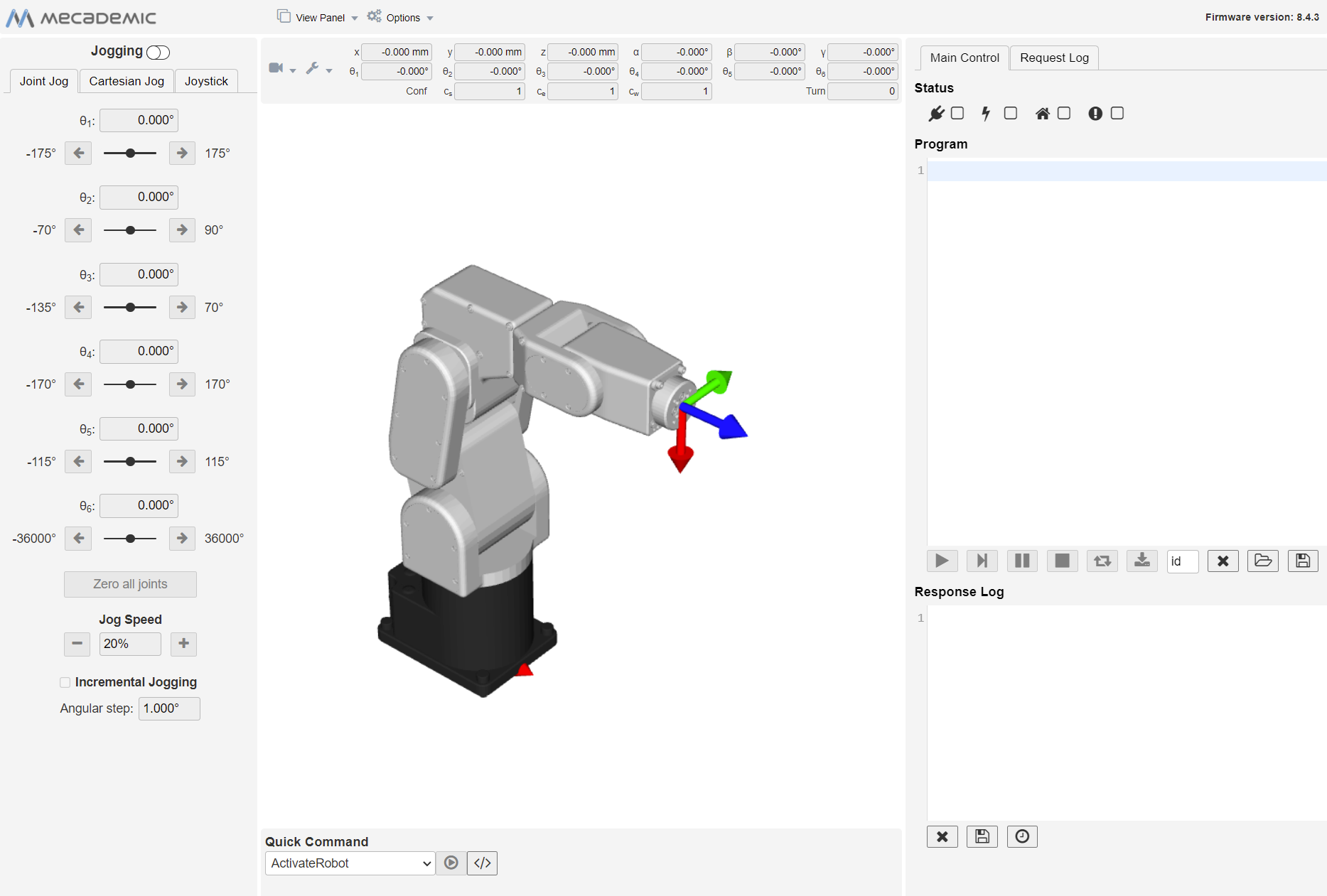
如果您无法看到机器人Web界面,请确保正确设置网络连接,如下图所示。

一旦您的Robodk模拟已准备就绪,您就可以生成脱机程序,该程序可以由Mecademic机器人控制器(脚本文件)执行。您还可以生成一个PY文件,该文件将从远程计算机上运行机器人控制器上的程序。
Follow these steps to generate an offline program (a script or a PY file) from your robot simulation:
1。右键单击程序(此示例中的PROG1)
2。选择生成机器人程序F6

该程序将在文本编辑器中显示(此行为可以在菜单中更改:工具➔选项➔程序).
获取程序/脚本文件后,您可以使用Web界面运行程序或将其加载到控制器上。请按照以下步骤使用Mexademic Web界面运行程序:
1。Open the Mecademic web interface on you web browser (type the robot IP address).
2。Copy and paste the script content into the程序编辑。
3.在里面Status酒吧,连接,Activate和Homeyour robot.
4。单击玩按钮运行程序。
5。单击savebutton to upload the program to the robot.
您可以生成一个Python文件,该文件将使用Mecademic TCP/IP接口自动连接到Mecademic Robot,并远程运行程序。
您应该选择名为Mexademic Python的后处理器。以下步骤概述了在Mecademic上运行PY文件的过程。
1。右键单击程序并选择选择后处理器
2。选择Mecademic Python
3.右键单击程序并选择生成机器人程序(F6)
4。将生成的PY文件保存在磁盘上。
5。Open and run the PY file in your IDE or run it directly from your python environment.
Robot drivers provide an alternative to Offline Programming (where a program is generated, then, transferred to the robot and executed). You can run a simulation from RoboDK directly on the robot (Online Programming). More information available in the机器人司机部分。
请按照以下步骤从Robodk连接到机器人:
1。右键单击Robodk中的机器人
2。选择:![]() 连接to robot…
连接to robot…
3.Enter the IP of the robot
4。选择连接.
应该有一个绿色消息显示Ready如果连接成功。

可以通过选择机器人移动获取机器人关节,Move Joints,从“连接”菜单中。
There are two different methods to run the program from the PC to the robot:
1。跑on robot通过Robodk(在线编程)的反馈一步一步:
This method uses the robot as a server and each instruction is sent to the robot step by step as it is executed in the simulator. This method is useful for debugging purposes.
a.Right click the program (Print3D in this example)
b.选择跑on robot
c.双击程序启动它(或右键单击并选择运行)
Once this option is checked it will connect to the real robot every time we double click a program (or right click, then, select跑)
这些操作也可从中获得Robodk API它允许将机器人编程与其他应用程序集成。API可在Python和C#和其他编程语言中使用。

2。将程序发送到机器人使用麦芽无候后处理器。它可用于通过指定“运行”作为程序编号来运行机器人上的程序。完整的程序也可以作为离线程序保存在机器人控制器上(请参阅机器人离线编程):
a.右键单击该程序(在此示例中PROG1)
b.选择将程序发送到机器人(Ctrl+F6).

本节在编程MecaCemic Meca500机器人时提供了其他有用的信息。
离线程序在机器人上持续使用,并使用其各自的程序编号可召唤。您可以通过将其添加到程序名称中来自动化程序编号选择。
Robodk将自动检索ID并使用它来调用程序。这也适用于子程序,请参阅下面的示例。

The joint speed and linear and joint accelerations units for Mecademic robots should be provided as a percentage value (%), contrary to other units displayed in the set speed instruction menu.
The linear speed is correct and needs to be provided in mm/s.
