Omron-TM机器人
使用默认的后置处理程序,您将获得您的程序是一个ZIP文件。你应该准备一个USB驱动器具有以下特征正确加载文件在机器人:
1。名字的USB驱动器TMROBOT(这一步很重要)。
2。创建一个新文件夹名为TM_Export驱动器的根源。
3所示。创建一个新文件夹里面TM_Export与您的项目(任何名称应该工作)。
4所示。以前的文件夹内创建一个新文件夹称为项目。
5。地方邮政计划在项目文件夹中。

按照以下步骤TMFlow加载程序:
1。将ZIP文件从RoboDK创建保存到USB驱动器的文件夹按照前面介绍的步骤进行操作。
2。选择主菜单➔系统➔导入/导出
3所示。选择Import TM_Export并选择文件夹
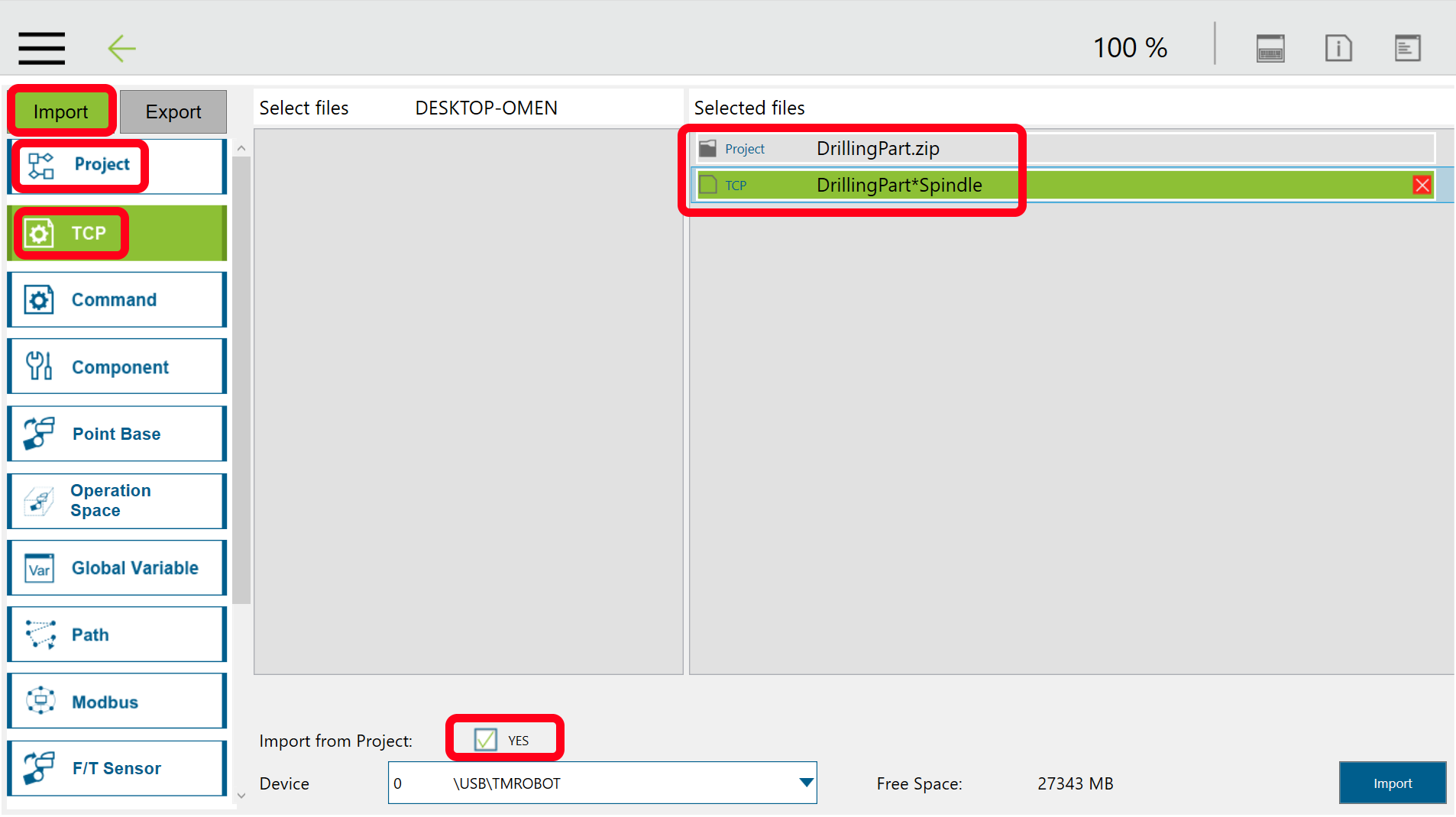
4所示。选择项目并选择ZIP程序(s)
5。选择TCP
6。检查选项导入的项目➔是的
7所示。选择您的项目并选择工具程序,以确保您加载它们。
8。选择Import
程序现在将提供当您选择新项目开业。