Omron-TM机器人
Omron-TM robots can be programmed offline from RoboDK using TMFlow ZIP files. You can also use the robot driver when the robot is in aListen Node直接将机器人实时移动。
Using the default post processor, you will obtain your program as a ZIP file. You should prepare a USB drive with the following characteristics to properly load the file on the robot:
1.Name the USB drive TMROBOT (this step is important).
2.Create a new folder called TM_Export at the root of your drive.
3.Create a new folder inside TM_Export with your project (any name should work).
4.Create a new folder inside the previous folder called Projects.
5.Place the ZIP programs inside the Projects folder.

Follow these steps to load the program in TMFlow:
1.按照先前的步骤保存从Robodk创建的ZIP文件到文件夹中的USB驱动器。
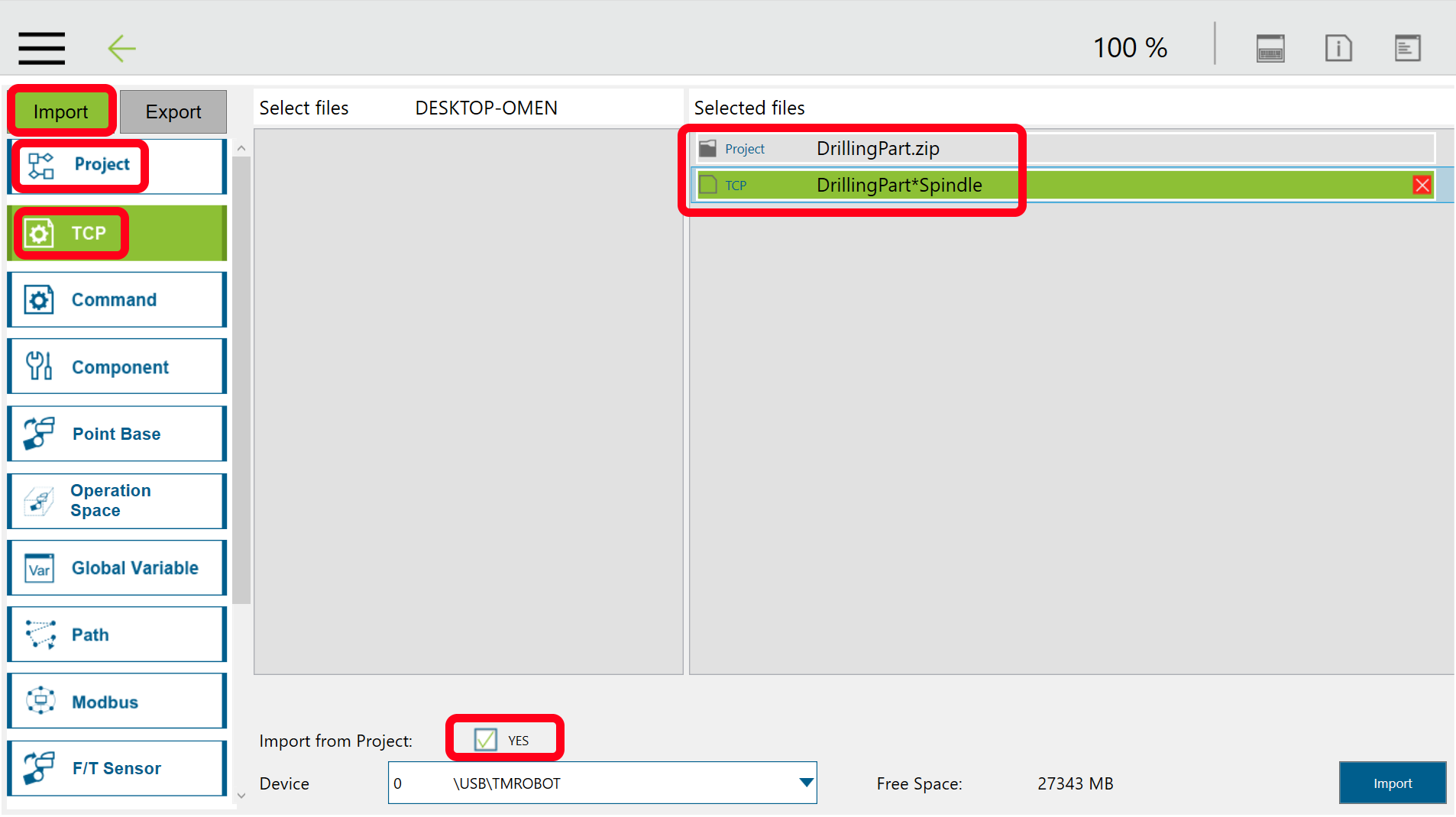
2.Select the main menu➔System➔Import/Export
3.选择导入and select your folder in TM_Export
4.Select Project and select your ZIP program(s)
5.Select TCP
6.检查项目从项目导入的选项是的
7.Select your program and select the tools in your program to make sure you load them.
8.选择导入
Your program will now be available when you select to open new programs.
您可以使用Robodk直接从Robodk上运行Omron-TM机器人程序司机对于omron-tm。您还可以将程序生成通过TCP/IP协议流传输的脚本文件。在这两种情况下,您都应确保机器人在Listen Node。本节介绍了如何在Robodk和Omron-TM机器人中设置通信。
可以在不同的地方选择post processorsor customize post processors to define the way programs are generated offline and executed (for example, to support a gripper or external sensors).
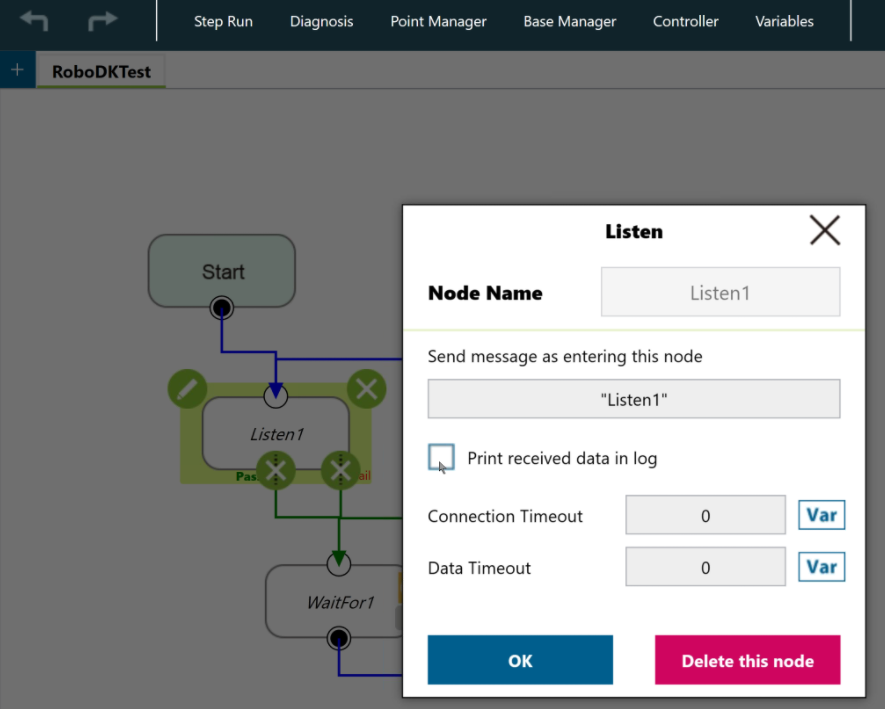
For the robot to move remotely, the robot needs to be inListen mode。This is accomplished using aListen Node。The following image shows a suggested program workflow to have a program that executes the program sent from RoboDK automatically. It is recommended to selectPrint received data in log解决问题。

请按照以下步骤设置Robodk中的通信并运行一个程序:
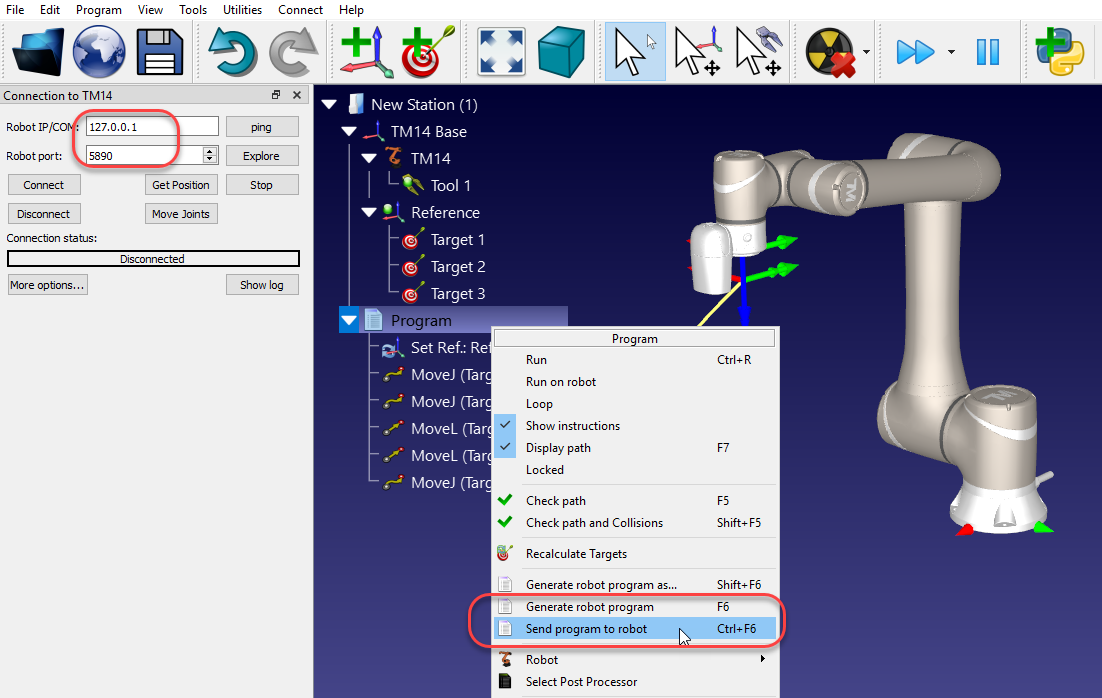
1.SelectConnect➔Connect robot
2.输入机器人IP
3.Enter the port 5890
4.Right click your program
5.SelectGenerate robot program F6。